LED display lamp
LED display lamp provides superior visibility for clear indication of NEXTAGE status.
LED display lamp provides superior visibility for clear indication of NEXTAGE status.
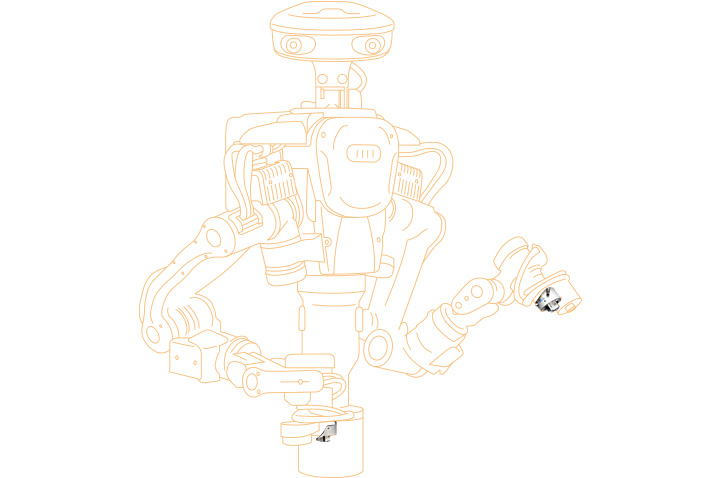
Service ports (backside of cover)
Mounted with pipes (exterior shape Φ3×4 type/each arm) and cables (AWG24 x 10/ each arm) for air.
Mounted with pipes (exterior shape Φ3×4 type/each arm) and cables (AWG24 x 10/ each arm) for air.
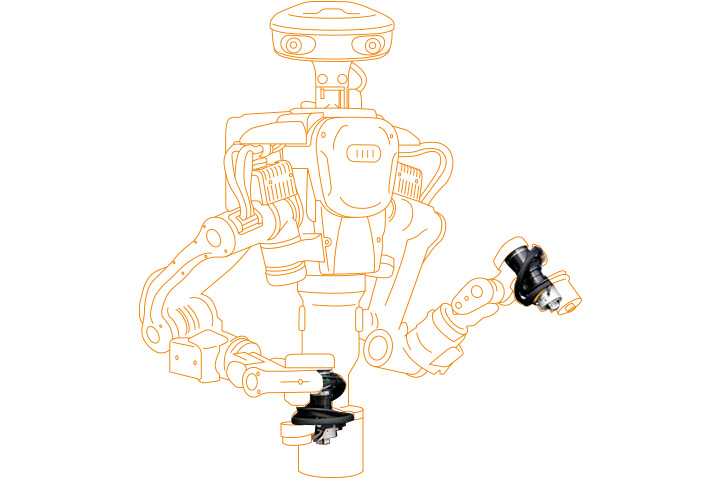
End effector attachment
Able to attach end effector optimal for specific application.
(Compatible via support from our company of the engineering manufacturer.)
Able to attach end effector optimal for specific application.
(Compatible via support from our company of the engineering manufacturer.)
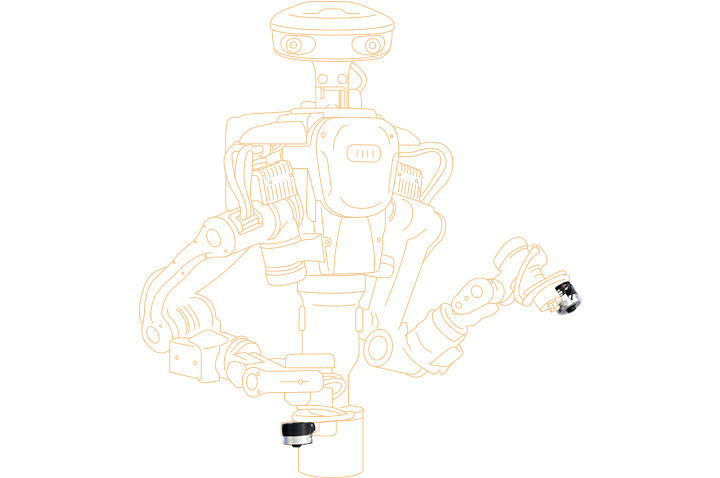
Hand camera
Detailed position awareness during tasks.
Detailed position awareness during tasks.
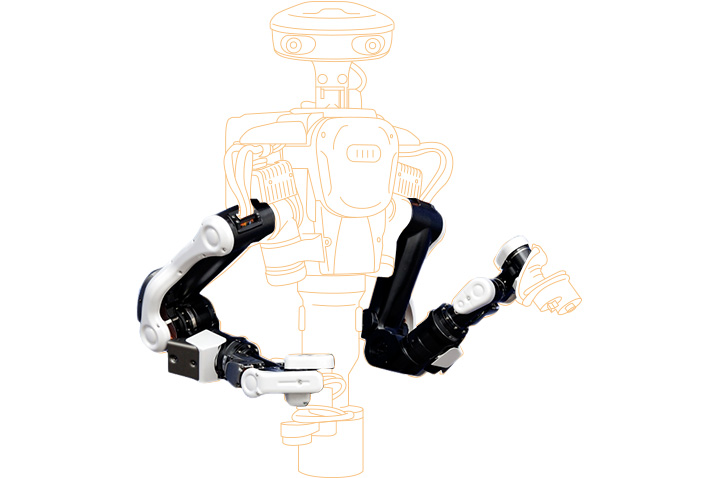
Arm shape
Curved shape prevents finger pinching.
Curved shape prevents finger pinching.
Axle structure
Arm component includes axle structure and inward tilt to prevent elbow protrusion.
The most unique component of the NEXTAGE exterior.
Arm component includes axle structure and inward tilt to prevent elbow protrusion.
The most unique component of the NEXTAGE exterior.
Head camera
Stereo vision enables environment recognition and position identification.
Stereo vision enables environment recognition and position identification.

{kind=link}
{kind=link}